Materials: Plywood, brass rod, and plastic.
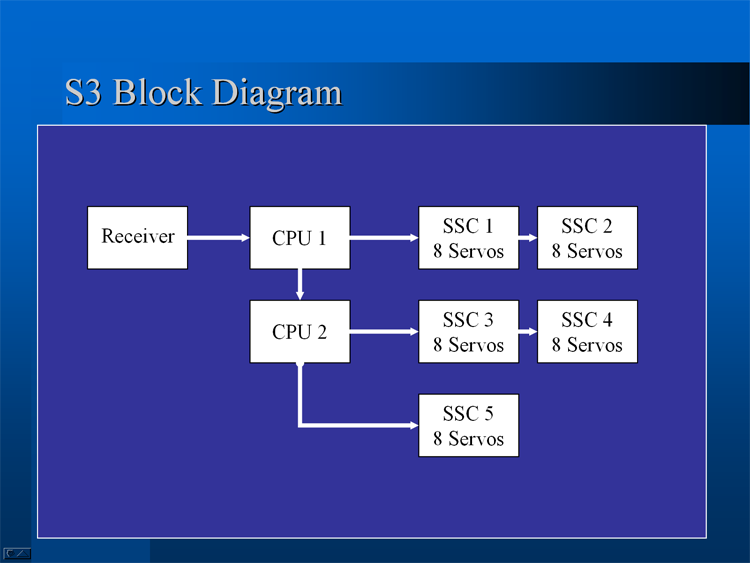
Components: Two Basic Stamp II microprocessors (20 MHz), 35 servos, 5 servo control units, 24 batteries, 4 channel radio control.
S3 represented a new design based on the cross-section of a real snake. The spinal column along the top is created using a train of universal joints that gives two degrees of freedom to each segment.
Pairs of servos are used in opposition in a novel arrangement. This enables the snake to undulate vertically as well as horizontally. The goal of this snake was to demonstrate sidewinding motion as well as
conventional horizontal undulatory progression. A second feature is the use of a single wheel under the middle of each segment, allowing the snake to move along like a train of rollerblades. Steering and
speed are controlled using one joystick while a second joystick controls lift and the amount of sidewinding.