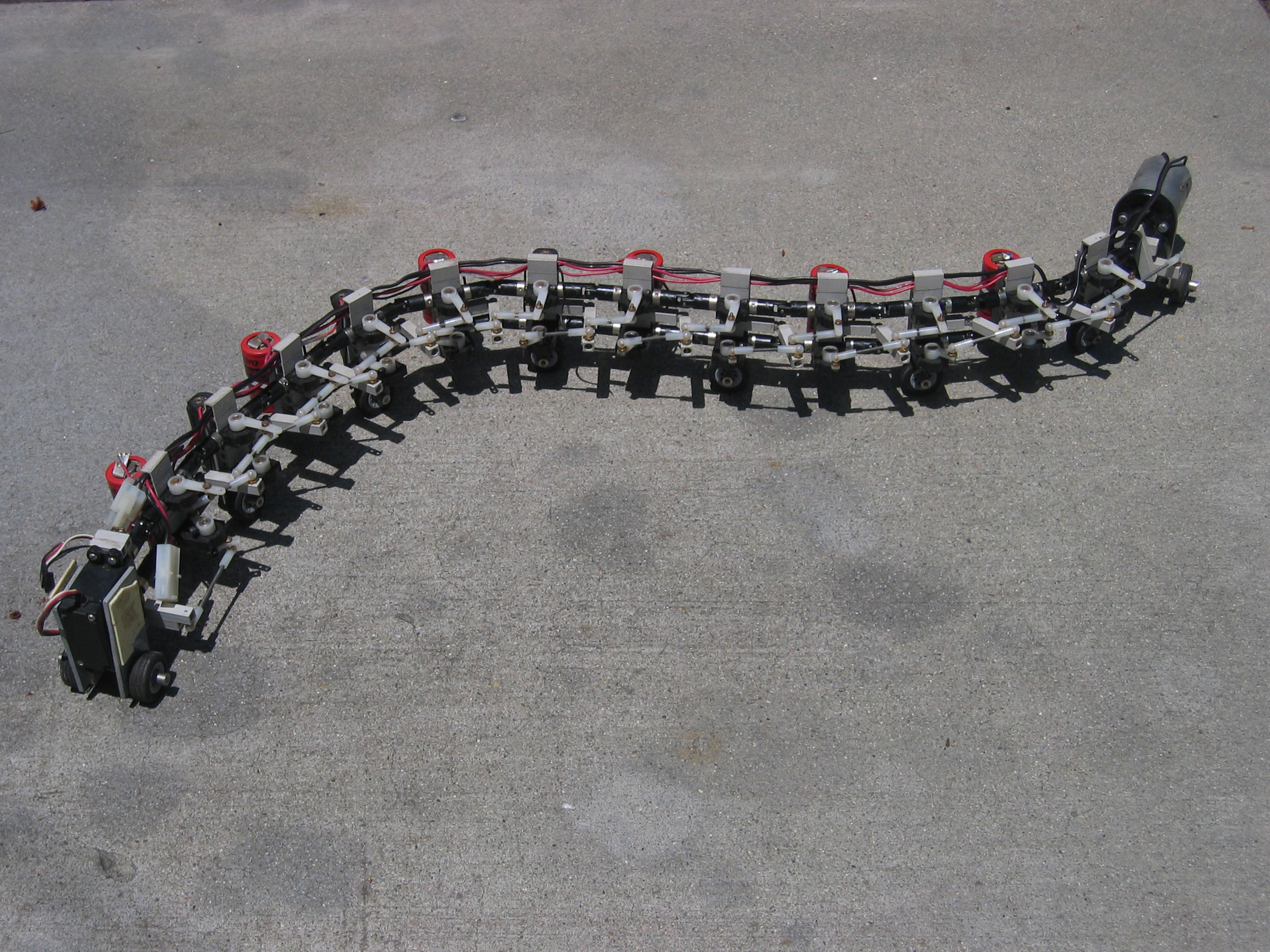
S4 Snake Robot Prototype (1997-1998)
Materials: brass and plastic.
S4 was an experimental prototype that explored using a single motor to create undulation along the length of the robot. The upper set of universal joints sent rotatary motion down the snake that caused worm gears
turn a crank that connected one segment to the next. A second set of universal joints performed a similar function but controlled an overall bias to the reciprocating motion, allowing steering of the robot. The pairs of universal joints
did not prove to be very satisfactory hinges and the cumulative amount of torque required caused the universal joints to become detached from their shafts. The robots fails to locomote more than a few feet.